Soft robots, partially or fully made of soft or flexible materials and compliant structures, have better environmental adaptability, safer interaction capability, enhanced dexterity, and increased robustness, compared to their rigid counterparts. Soft robots are thus more applicable to adaptive and complex tasks in unpredictable and unstructured environments.
Soft actuators, soft sensors, soft controllers, soft power sources are key components of soft robots. Our group leverages bio-inspired and mechanics driven soft material and structure design and additive manufacturing based fabrication tools to develop our soft machines. Our soft actuators mainly include: pneumatic artificial muscles (see Fig. 1), dielectric elastomer actuators, shape memory polymer actuators, and flexible electrostatic actuators. Our soft sensors include: soft capacitive, resistive, inductive, and visio-tactile sensors.
We have employed our soft actuators and sensors to form a range of bio-inspired soft robots (see Fig. 2), including soft crawlers, soft rollers, soft climbers, soft swallowers, and dexterous soft manipulators.

Fig. 1 Pneumatic artificial muscle driven soft manipulator pouring water from a bottle
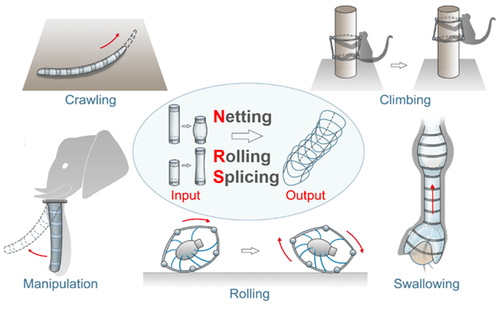
Fig. 2 Smart stacking soft actuators for bio-inspired soft robots
